Mixed Precision Training
float32 v/s float16 v/s bfloat16
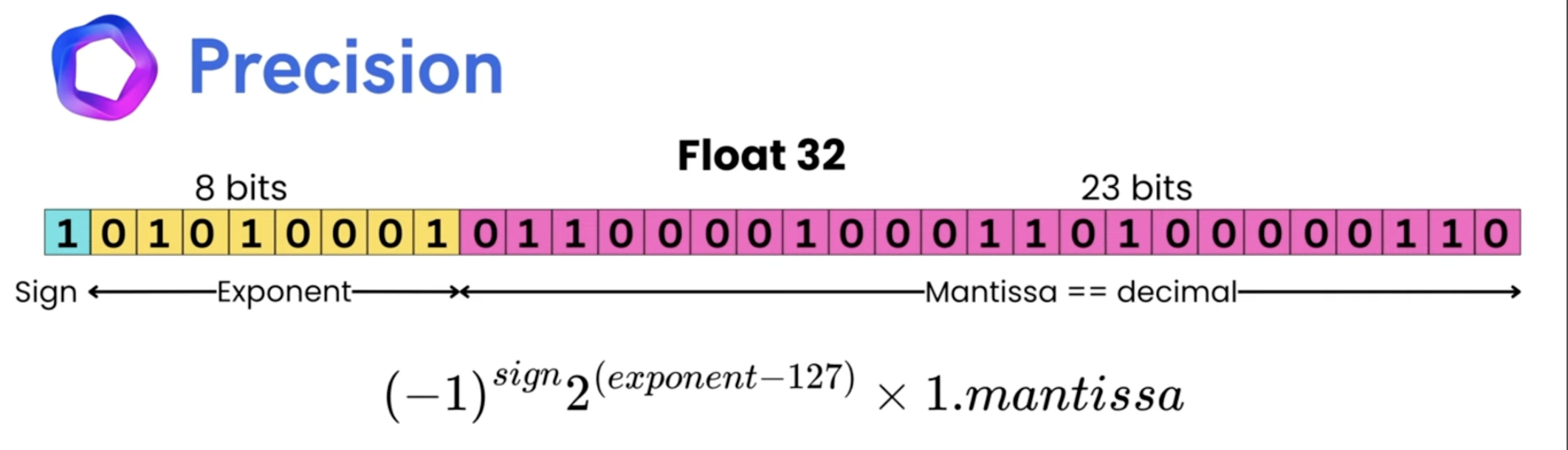
Precision comparision
float32
float16 & bfloat16 & float8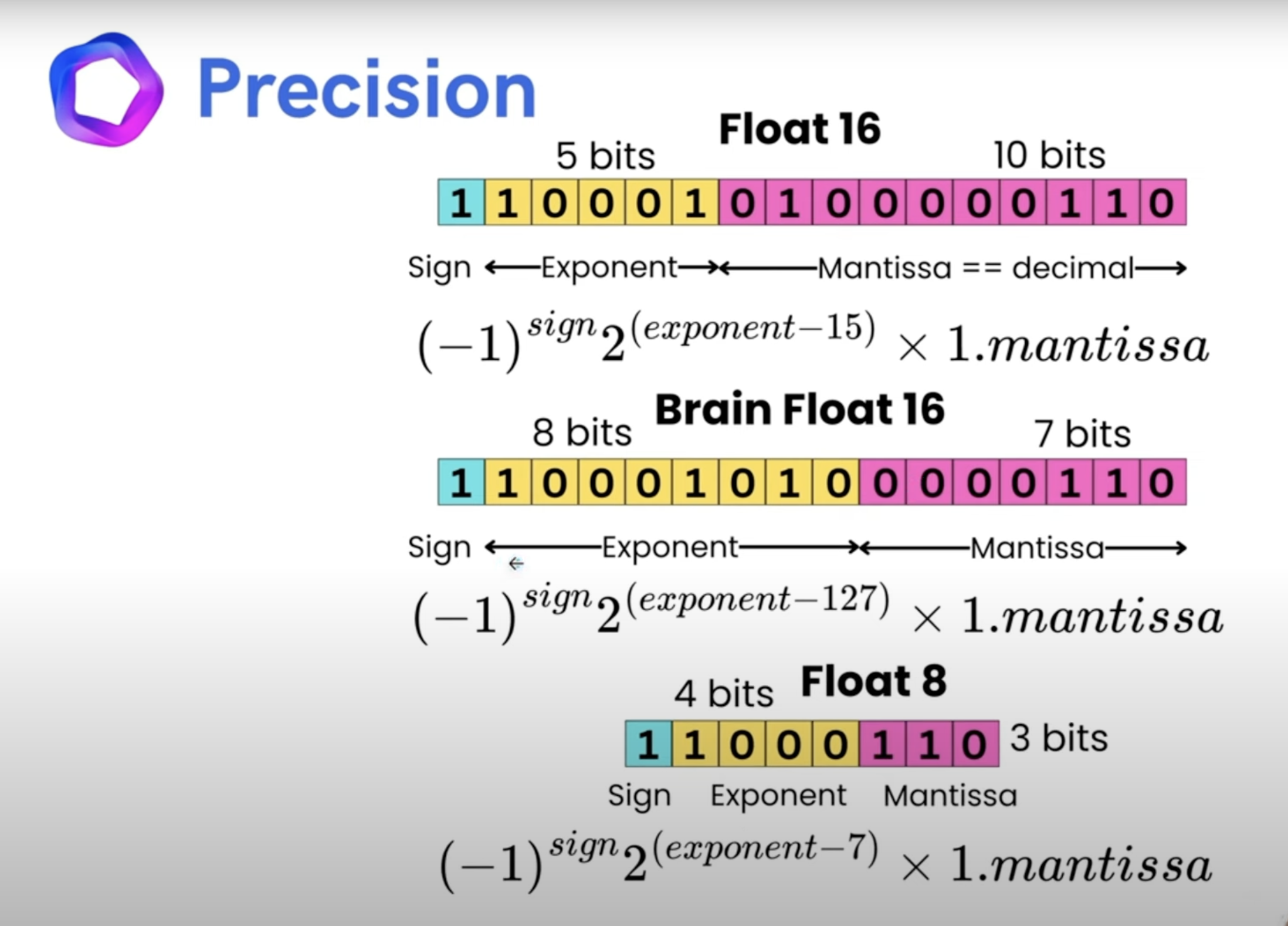
<ul> <li><code>float32</code> & <code>bfloat16</code> have similar range, but <code>float32</code> has higher precision.</li> <li><code>float16</code> has both lower range & precision compared to <code>float32</code>.</li> <li><code>float16</code> has a smaller dynamic range compared to <code>bfloat16</code>, but <code>bfloat16</code> has lower precision.</li> </ul>
Range Comparison
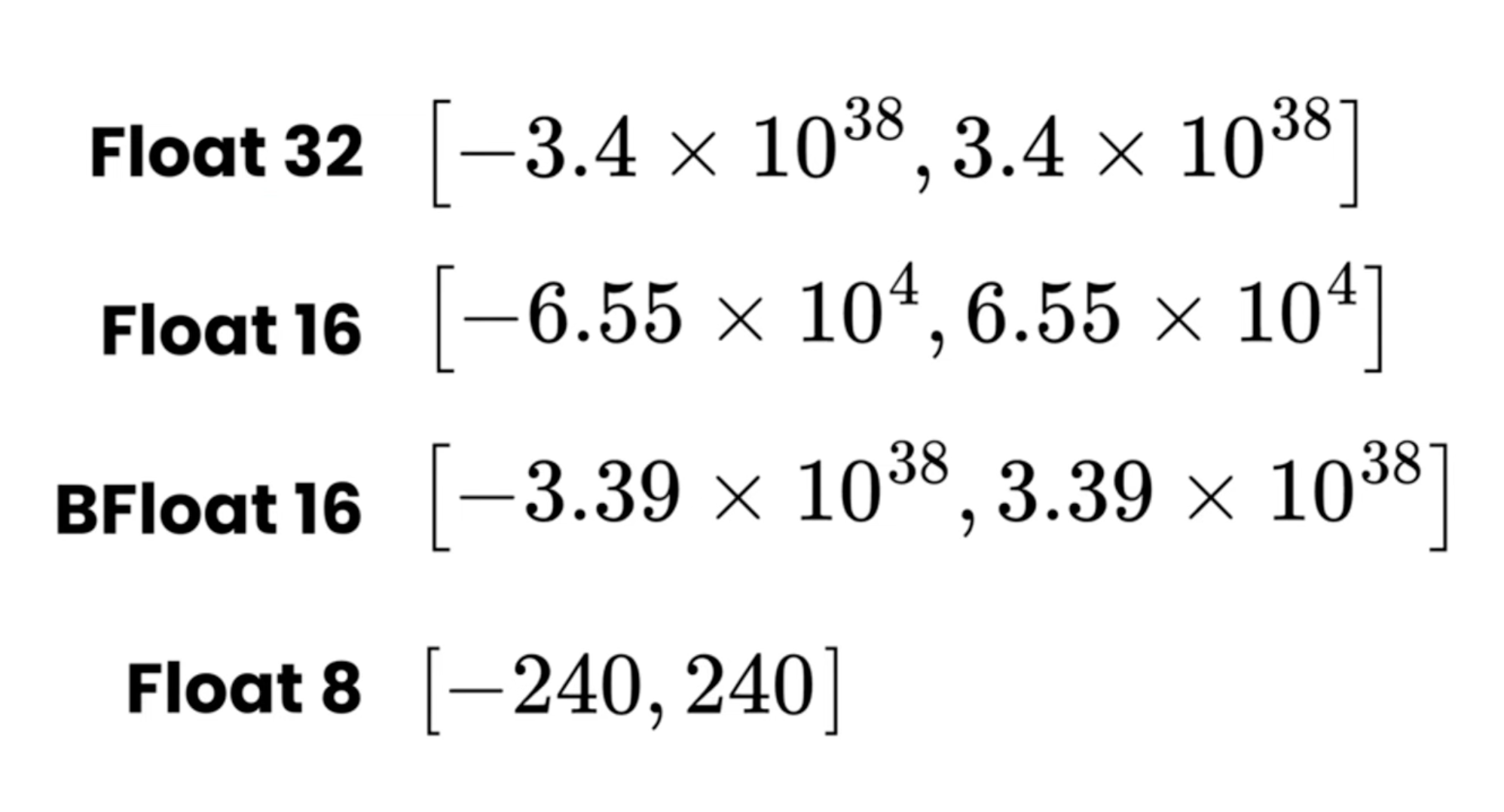
<p><code>Note</code>: <code>bfloat16</code> & <code>float32</code> have similar ranges, but <code>float32</code> has higher precision.</p>
Converting datatype
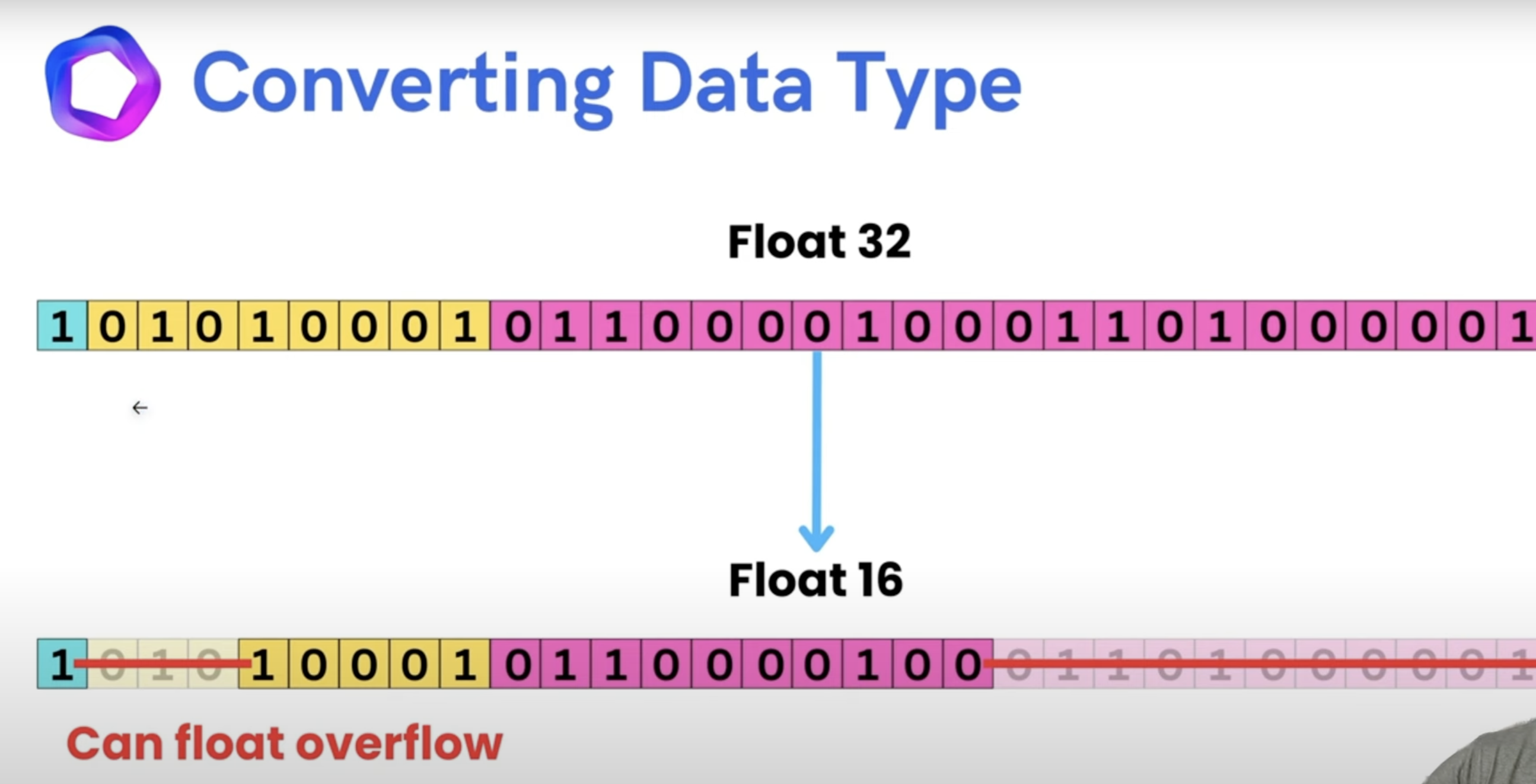
- has risk of
overflow
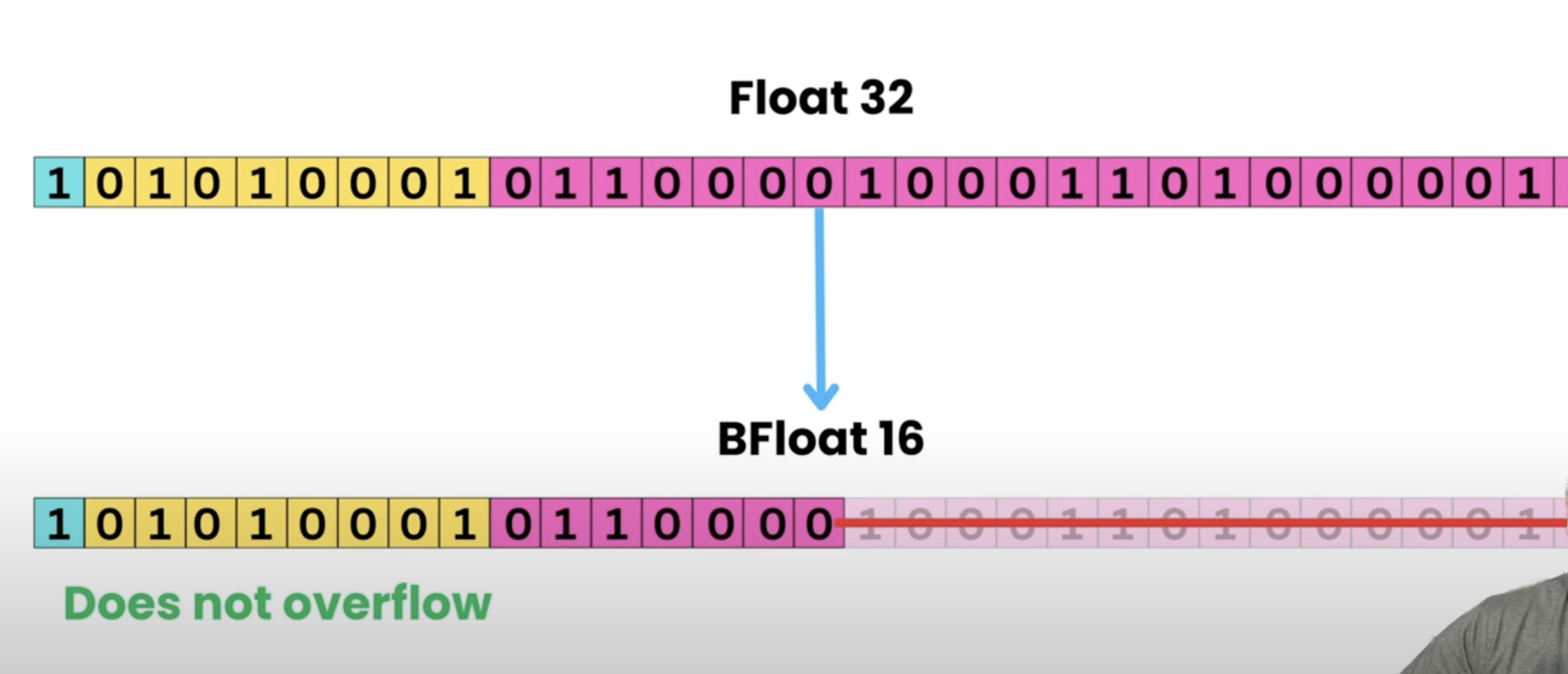
- doesn’t
overflow
Mixed Precision Training in PyTorch
Mixed precision training is a technique that combines the use of both 16-bit (half precision) and 32-bit (single precision) floating-point representations during training to accelerate training while maintaining model accuracy.
<p>Mixed precision training can provide up to 1.5-2x speedup on modern GPUs with Tensor Cores (V100, A100, RTX series) while reducing memory usage by approximately 50%.</p>
What is Mixed Precision Training?
Mixed precision training uses lower precision (FP16) for most operations while keeping higher precision (FP32) for operations that require it. This approach:
- Speeds up training by leveraging specialized hardware (Tensor Cores)
- Reduces memory usage by storing activations and gradients in FP16
- Maintains training stability by using FP32 for loss scaling and parameter updates
- Preserves model accuracy through careful handling of numerical precision
Key Concepts
1. Automatic Mixed Precision (AMP)
PyTorch’s AMP automatically decides which operations should use FP16 vs FP32 based on:
- Safe operations: Matrix multiplications, convolutions → FP16
- Unsafe operations: Loss functions, softmax, layer norm → FP32
2. Loss Scaling
- FP16 has a smaller dynamic range than FP32, which can cause gradient underflow
- Loss scaling multiplies the loss by a large factor before backpropagation
- Gradients are unscaled before optimizer step to maintain correct magnitudes
3. Gradient Scaling and Unscaling
- Scaling: Prevents gradient underflow by amplifying small gradients
- Unscaling: Restores original gradient magnitudes before parameter updates
- Dynamic scaling: Automatically adjusts scale factor based on gradient overflow detection
Basic Mixed Precision Training
import torch
import torch.nn as nn
import torch.optim as optim
from torch.cuda.amp import autocast, GradScaler
# Model, loss, optimizer
model = nn.Linear(1000, 10).cuda()
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3)
# Create gradient scaler for mixed precision
scaler = GradScaler()
# Training data
data = torch.randn(64, 1000).cuda()
targets = torch.randint(0, 10, (64,)).cuda()
model.train()
optimizer.zero_grad()
# Forward pass with autocast
with autocast():
outputs = model(data)
loss = criterion(outputs, targets)
# Backward pass with scaled loss
scaler.scale(loss).backward()
# Optimizer step with gradient unscaling
scaler.step(optimizer)
# Update scaler for next iteration
scaler.update()
print(f"Loss: {loss.item():.4f}")Key Components Explained
autocast(): Context manager that automatically casts operations to appropriate precisionGradScaler(): Handles loss scaling, gradient unscaling, and dynamic scale factor updatesscaler.scale(loss): Scales loss before backward pass to prevent gradient underflowscaler.step(optimizer): Unscales gradients and performs optimizer step if no overflowscaler.update(): Updates the scale factor for next iteration
What actually happens in Mixed-Precision training?
The Mixed Precision Training Workflow
The training process is a loop that repeats for every batch of data. Here is what happens inside a single training loop with mixed precision:
1. The Forward Pass
- Action: A temporary
float16copy of the weights is created. The input data is also converted tofloat16. - Calculation: All the computationally-heavy operations (matrix multiplications) are performed using
float16. This is much faster on modern GPUs with special hardware like Tensor Cores. - Memory Impact: The intermediate outputs, called activations, are also stored in
float16. Since activations take up a huge amount of memory, this is the main source of the memory savings.
[ Diagram: Forward Pass ]
--------------------->>
Input Data (float32)
[ Convert to float16 ]
v
v
+-------------------+
| Model (in float16)| <--- [TEMPORARY]
| - Weights |
| - Biases |
+-------------------+
| Activations | <--- [STORED in float16]
| Gradients |
+-------------------+
v
Output (float16)2. Loss Scaling
- Action: The
float16output from the forward pass is used to calculate the loss. This loss is then multiplied by a large number (the “loss scaler”). - Calculation:
loss = loss * scaler - Why? The gradients for some layers can be extremely small. If they were in
float16, they would be rounded to zero, causing the model to stop learning. By scaling up the loss, all the gradients that are calculated in the next step are also scaled up, so they don’t disappear. The loss itself remainsfloat16.
3. The Backward Pass
- Action: The backward pass is run using the scaled
float16loss and thefloat16activations that were saved from the forward pass. - Calculation: The gradients are calculated for each weight.
- Memory & Stability: The gradients are now in
float16but are much larger thanks to loss scaling. Crucially, they are immediately converted tofloat32before being stored.
[ Diagram: Backward Pass ]
Unscaled Loss (float16)
|
| [ Multiply by a large number ]
V
Scaled Loss (float16)
|
| [ Backward Pass (Chain Rule) ]
V
Unscaled Gradients (float16) <--- [CONVERTED & STORED]
as float324. The Optimizer Step
- Action: The gradients are now in
float32. The optimizer first divides them by the same loss scaler to get their true, unscaled value. - Calculation:
unscaled_gradient = scaled_gradient / scaler - Final Update: The optimizer then uses these
float32gradients to update the masterfloat32weights.
[ Diagram: Optimizer Step ]
Master Weights (float32)
^
| [ Update Weights ]
|
+---------------------+
| Optimizer |
| - Unscales Grads |
| - Updates Weights |
+---------------------+
^
Unscaled Gradients (float32)Why it Reduces GPU Memory Usage
The primary reason for the memory reduction is that a large part of the memory footprint of a neural network is not the model itself, but the activations that are created in the forward pass and stored for the backward pass.
- A
float32number takes 4 bytes of memory. - A
float16number takes only 2 bytes of memory.
By performing the forward pass and storing the activations in float16, you are cutting the memory used by activations by 50%. For very large models, this can be the difference between a training run failing with an “out of memory” error and succeeding, or it can allow you to use a much larger batch size to speed up training.
The model parameters and final gradients are a smaller portion of the total memory, so by using float32 for them, you maintain numerical stability without sacrificing the massive memory savings from the activations.
Complete Training Loop with Mixed Precision
import torch
import torch.nn as nn
import torch.optim as optim
from torch.cuda.amp import autocast, GradScaler
from torch.utils.data import DataLoader, TensorDataset
# Model definition
class SimpleModel(nn.Module):
def __init__(self, input_size, hidden_size, num_classes):
super(SimpleModel, self).__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.relu = nn.ReLU()
self.fc2 = nn.Linear(hidden_size, num_classes)
def forward(self, x):
x = self.fc1(x)
x = self.relu(x)
x = self.fc2(x)
return x
# Setup
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = SimpleModel(784, 256, 10).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3)
# Mixed precision components
scaler = GradScaler()
# Dummy dataset
dataset = TensorDataset(
torch.randn(1000, 784),
torch.randint(0, 10, (1000,))
)
dataloader = DataLoader(dataset, batch_size=32, shuffle=True)
# Training loop
num_epochs = 5
for epoch in range(num_epochs):
model.train()
total_loss = 0.0
for batch_idx, (data, targets) in enumerate(dataloader):
data, targets = data.to(device), targets.to(device)
# Zero gradients
optimizer.zero_grad()
# Forward pass with autocast
with autocast():
outputs = model(data)
loss = criterion(outputs, targets)
# Backward pass with scaled loss
scaler.scale(loss).backward()
# Optimizer step with gradient clipping (optional)
scaler.unscale_(optimizer) # Unscale gradients for clipping
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
# Update model parameters
scaler.step(optimizer)
scaler.update()
total_loss += loss.item()
if batch_idx % 10 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Step [{batch_idx}/{len(dataloader)}], '
f'Loss: {loss.item():.4f}, Scale: {scaler.get_scale():.0f}')
avg_loss = total_loss / len(dataloader)
print(f'Epoch [{epoch+1}/{num_epochs}] Average Loss: {avg_loss:.4f}')Advanced Features
scaler.unscale_(optimizer): Manually unscales gradients before gradient clippingscaler.get_scale(): Gets current scale factor for monitoring- Gradient clipping: Applied after unscaling but before optimizer step
Mixed Precision with Gradient Accumulation
import torch
from torch.cuda.amp import autocast, GradScaler
# Setup
model = SimpleModel(784, 256, 10).cuda()
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3)
scaler = GradScaler()
# Gradient accumulation parameters
accumulation_steps = 4
effective_batch_size = 32 * accumulation_steps # 128
# Training with gradient accumulation
for epoch in range(num_epochs):
model.train()
optimizer.zero_grad()
for batch_idx, (data, targets) in enumerate(dataloader):
data, targets = data.to(device), targets.to(device)
# Forward pass with autocast
with autocast():
outputs = model(data)
loss = criterion(outputs, targets)
# Scale loss for accumulation
loss = loss / accumulation_steps
# Backward pass with scaled loss
scaler.scale(loss).backward()
# Perform optimizer step every accumulation_steps
if (batch_idx + 1) % accumulation_steps == 0:
# Optional gradient clipping
scaler.unscale_(optimizer)
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
# Update parameters
scaler.step(optimizer)
scaler.update()
optimizer.zero_grad()
print(f'Step completed with effective batch size: {effective_batch_size}')
# Handle remaining batches if dataset size not divisible by accumulation_steps
if len(dataloader) % accumulation_steps != 0:
scaler.step(optimizer)
scaler.update()
optimizer.zero_grad()Key Points for Gradient Accumulation
- Loss scaling: Divide loss by
accumulation_stepsto maintain correct gradient magnitudes - Scaler operations: Only call
scaler.step()andscaler.update()after accumulation completes - Gradient clearing: Zero gradients only after optimizer step, not after each backward pass
Mixed Precision with DDP (Distributed Training)
import torch
import torch.distributed as dist
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.cuda.amp import autocast, GradScaler
def setup_ddp(rank, world_size):
"""Initialize distributed training"""
dist.init_process_group("nccl", rank=rank, world_size=world_size)
torch.cuda.set_device(rank)
def cleanup_ddp():
"""Clean up distributed training"""
dist.destroy_process_group()
def train_ddp(rank, world_size):
setup_ddp(rank, world_size)
# Model setup
model = SimpleModel(784, 256, 10).cuda(rank)
model = DDP(model, device_ids=[rank])
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3)
scaler = GradScaler()
# Distributed sampler
from torch.utils.data.distributed import DistributedSampler
dataset = TensorDataset(torch.randn(1000, 784), torch.randint(0, 10, (1000,)))
sampler = DistributedSampler(dataset, num_replicas=world_size, rank=rank)
dataloader = DataLoader(dataset, batch_size=32, sampler=sampler)
# Training loop
for epoch in range(num_epochs):
sampler.set_epoch(epoch) # Important for proper shuffling
model.train()
for batch_idx, (data, targets) in enumerate(dataloader):
data, targets = data.cuda(rank), targets.cuda(rank)
optimizer.zero_grad()
# Forward pass with autocast
with autocast():
outputs = model(data)
loss = criterion(outputs, targets)
# Backward pass with scaled loss
scaler.scale(loss).backward()
# Gradient clipping (optional)
scaler.unscale_(optimizer)
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
# Update parameters
scaler.step(optimizer)
scaler.update()
if rank == 0 and batch_idx % 10 == 0:
print(f'Rank {rank}, Epoch [{epoch+1}], Step [{batch_idx}], '
f'Loss: {loss.item():.4f}')
cleanup_ddp()
# Launch distributed training
if __name__ == "__main__":
world_size = 4 # Number of GPUs
mp.spawn(train_ddp, args=(world_size,), nprocs=world_size, join=True)DDP with Mixed Precision Notes
- Individual scalers: Each process maintains its own
GradScalerinstance - Gradient synchronization: DDP automatically synchronizes gradients across processes
- Scale factor synchronization: Scale factors may differ across processes, which is normal
- Distributed sampler: Essential for proper data distribution across processes
Mixed Precision with DDP + Gradient Accumulation
def train_ddp_with_accumulation(rank, world_size):
setup_ddp(rank, world_size)
model = SimpleModel(784, 256, 10).cuda(rank)
model = DDP(model, device_ids=[rank])
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3)
scaler = GradScaler()
# Gradient accumulation settings
accumulation_steps = 4
dataset = TensorDataset(torch.randn(1000, 784), torch.randint(0, 10, (1000,)))
sampler = DistributedSampler(dataset, num_replicas=world_size, rank=rank)
dataloader = DataLoader(dataset, batch_size=16, sampler=sampler) # Smaller batch per step
for epoch in range(num_epochs):
sampler.set_epoch(epoch)
model.train()
optimizer.zero_grad()
for batch_idx, (data, targets) in enumerate(dataloader):
data, targets = data.cuda(rank), targets.cuda(rank)
# Determine if this is the final accumulation step
is_final_step = (batch_idx + 1) % accumulation_steps == 0
# Conditional gradient synchronization
if not is_final_step:
# Disable gradient synchronization for intermediate steps
with model.no_sync():
with autocast():
outputs = model(data)
loss = criterion(outputs, targets) / accumulation_steps
scaler.scale(loss).backward()
else:
# Final step: enable gradient synchronization
with autocast():
outputs = model(data)
loss = criterion(outputs, targets) / accumulation_steps
scaler.scale(loss).backward()
# Gradient clipping and optimizer step
scaler.unscale_(optimizer)
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
scaler.step(optimizer)
scaler.update()
optimizer.zero_grad()
if rank == 0:
effective_batch = 16 * accumulation_steps * world_size
print(f'Optimizer step completed, effective batch size: {effective_batch}')
# Handle remaining batches
if len(dataloader) % accumulation_steps != 0:
scaler.step(optimizer)
scaler.update()
optimizer.zero_grad()
cleanup_ddp()<p>To use <code>gradient_clipping</code>, first <code>unscale</code> the gradients:</p>
# Gradient clipping
scaler.unscale_(optimizer)
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)Best Practices and Troubleshooting
1. Monitoring Scale Factor
# Monitor scale factor to detect issues
current_scale = scaler.get_scale()
if current_scale < 1.0:
print("Warning: Scale factor is very low, potential gradient underflow")
elif current_scale > 65536:
print("Warning: Scale factor is very high, potential gradient overflow")2. Handling Scale Factor Updates
# Custom scale factor management
scaler = GradScaler(
init_scale=2.**16, # Initial scale factor
growth_factor=2.0, # Factor to multiply scale on successful steps
backoff_factor=0.5, # Factor to multiply scale on overflow
growth_interval=2000 # Steps between scale increases
)3. Model Evaluation with Mixed Precision
def evaluate_model(model, dataloader, criterion, device):
model.eval()
total_loss = 0.0
correct = 0
total = 0
with torch.no_grad():
for data, targets in dataloader:
data, targets = data.to(device), targets.to(device)
# Use autocast for inference too
with autocast():
outputs = model(data)
loss = criterion(outputs, targets)
total_loss += loss.item()
_, predicted = outputs.max(1)
total += targets.size(0)
correct += predicted.eq(targets).sum().item()
accuracy = 100. * correct / total
avg_loss = total_loss / len(dataloader)
return avg_loss, accuracy4. Common Issues and Solutions
Gradient Overflow:
- Reduce learning rate
- Increase gradient clipping threshold
- Lower initial scale factor
Poor Convergence:
- Ensure loss scaling is appropriate
- Check if certain operations need FP32 (use
autocast(enabled=False)) - Monitor gradient norms
Memory Issues:
- Mixed precision should reduce memory usage
- If memory increases, check for unnecessary FP32 conversions
5. Custom Autocast Policies
# Custom autocast for specific operations
with autocast():
x = model.encoder(input_data)
# Force FP32 for sensitive operations
with autocast(enabled=False):
attention_weights = torch.softmax(x.float(), dim=-1)
# Resume FP16
output = model.decoder(attention_weights.half())FSDP mixed-precision training
FSDP (Fully Sharded Data Parallel) provides built-in mixed precision training through the MixedPrecision policy, offering native precision control for distributed training without requiring external tools like AMP’s autocast/GradScaler.
<p>FSDP’s mixed precision is designed specifically for distributed training and handles parameter sharding, gradient synchronization, and precision conversion automatically.</p>
What is FSDP Mixed Precision?
FSDP mixed precision provides granular control over data types for different components of distributed training:
- Integrated approach: Mixed precision is built into FSDP’s parameter management
- No loss scaling needed: FSDP handles numerical stability internally
- Distributed-aware: Optimized for gradient synchronization across multiple devices
- Memory efficient: Works seamlessly with parameter sharding
Key Components
MixedPrecision Policy Parameters
param_dtype: Data type for model parameters during forward/backward computationreduce_dtype: Data type for gradient reduction across processesbuffer_dtype: Data type for model buffers (batch norm stats, etc.) - FSDP1 only
Common Configurations
# Speed-optimized configuration
MixedPrecision(
param_dtype=torch.bfloat16, # BF16 for computation speed
reduce_dtype=torch.float32, # FP32 for stable gradient sync
buffer_dtype=torch.bfloat16 # BF16 for buffers (FSDP1)
)
# Memory-optimized configuration
MixedPrecision(
param_dtype=torch.float16, # FP16 for maximum memory savings
reduce_dtype=torch.float32, # FP32 for numerical stability
buffer_dtype=torch.float16 # FP16 for buffers (FSDP1)
)
# Conservative configuration
MixedPrecision(
param_dtype=torch.float32, # FP32 for full precision
reduce_dtype=torch.float32, # FP32 for maximum stability
buffer_dtype=torch.float32 # FP32 for buffers (FSDP1)
)FSDP1 Mixed Precision Training
Basic Setup
import torch
import torch.nn as nn
import torch.optim as optim
from torch.distributed.fsdp import (
FullyShardedDataParallel as FSDP,
MixedPrecision,
ShardingStrategy,
BackwardPrefetch,
)
import torch.distributed as dist
def setup_fsdp1():
# Initialize distributed training
dist.init_process_group("nccl")
rank = dist.get_rank()
world_size = dist.get_world_size()
device = torch.device(f"cuda:{rank}")
torch.cuda.set_device(device)
return rank, world_size, device
# Mixed precision policy
mixed_precision_policy = MixedPrecision(
param_dtype=torch.bfloat16, # Use BF16 for parameters
reduce_dtype=torch.float32, # Use FP32 for gradient reduction
buffer_dtype=torch.bfloat16, # Use BF16 for buffers
)
# Model definition
class SimpleModel(nn.Module):
def __init__(self, vocab_size, hidden_size, num_layers):
super().__init__()
self.embedding = nn.Embedding(vocab_size, hidden_size)
self.layers = nn.ModuleList([
nn.Linear(hidden_size, hidden_size) for _ in range(num_layers)
])
self.output = nn.Linear(hidden_size, vocab_size)
def forward(self, x):
x = self.embedding(x)
for layer in self.layers:
x = torch.relu(layer(x))
return self.output(x)
# Setup
rank, world_size, device = setup_fsdp1()
model = SimpleModel(vocab_size=1000, hidden_size=512, num_layers=4)
# Wrap model with FSDP1
fsdp_model = FSDP(
model,
mixed_precision=mixed_precision_policy,
sharding_strategy=ShardingStrategy.FULL_SHARD,
backward_prefetch=BackwardPrefetch.BACKWARD_PRE,
device_id=rank,
)
# Optimizer and criterion
optimizer = optim.Adam(fsdp_model.parameters(), lr=1e-4)
criterion = nn.CrossEntropyLoss()Training Loop FSDP1
def train_fsdp1(fsdp_model, dataloader, optimizer, criterion, num_epochs=5):
"""Training loop for FSDP1 with mixed precision"""
fsdp_model.train()
for epoch in range(num_epochs):
total_loss = 0.0
for batch_idx, (data, targets) in enumerate(dataloader):
data = data.to(device)
targets = targets.to(device)
# Zero gradients
optimizer.zero_grad()
# Forward pass - FSDP handles precision automatically
outputs = fsdp_model(data)
loss = criterion(outputs, targets)
# Backward pass - no scaling needed
loss.backward()
# Optional: Gradient clipping
torch.nn.utils.clip_grad_norm_(fsdp_model.parameters(), max_norm=1.0)
# Optimizer step
optimizer.step()
total_loss += loss.item()
if rank == 0 and batch_idx % 10 == 0:
print(f'FSDP1 - Epoch [{epoch+1}/{num_epochs}], '
f'Step [{batch_idx}], Loss: {loss.item():.4f}')
if rank == 0:
avg_loss = total_loss / len(dataloader)
print(f'FSDP1 - Epoch [{epoch+1}] Average Loss: {avg_loss:.4f}')
# Example usage
dummy_dataset = torch.utils.data.TensorDataset(
torch.randint(0, 1000, (1000, 128)), # Input sequences
torch.randint(0, 1000, (1000, 128)) # Target sequences
)
distributed_sampler = torch.utils.data.distributed.DistributedSampler(
dummy_dataset, num_replicas=world_size, rank=rank
)
dataloader = torch.utils.data.DataLoader(
dummy_dataset, batch_size=8, sampler=distributed_sampler
)
train_fsdp1(fsdp_model, dataloader, optimizer, criterion)FSDP1 with Gradient Accumulation
def train_fsdp1_with_accumulation(fsdp_model, dataloader, optimizer, criterion,
accumulation_steps=4, num_epochs=5):
"""FSDP1 training with gradient accumulation"""
fsdp_model.train()
for epoch in range(num_epochs):
total_loss = 0.0
optimizer.zero_grad()
for batch_idx, (data, targets) in enumerate(dataloader):
data = data.to(device)
targets = targets.to(device)
# Determine if this is the final accumulation step
is_final_step = (batch_idx + 1) % accumulation_steps == 0
if not is_final_step:
# Disable gradient synchronization for intermediate steps
with fsdp_model.no_sync():
outputs = fsdp_model(data)
loss = criterion(outputs, targets) / accumulation_steps
loss.backward()
else:
# Final step: enable gradient synchronization
outputs = fsdp_model(data)
loss = criterion(outputs, targets) / accumulation_steps
loss.backward()
# Gradient clipping and optimizer step
torch.nn.utils.clip_grad_norm_(fsdp_model.parameters(), max_norm=1.0)
optimizer.step()
optimizer.zero_grad()
if rank == 0:
effective_batch = 8 * accumulation_steps * world_size
print(f'FSDP1 - Optimizer step, effective batch size: {effective_batch}')
total_loss += loss.item() * accumulation_steps # Adjust for scaling
# Handle remaining batches
if len(dataloader) % accumulation_steps != 0:
torch.nn.utils.clip_grad_norm_(fsdp_model.parameters(), max_norm=1.0)
optimizer.step()
optimizer.zero_grad()
# Usage
train_fsdp1_with_accumulation(fsdp_model, dataloader, optimizer, criterion)FSDP2 Mixed Precision Training
Basic Setup FSDP2
import torch
import torch.nn as nn
from torch.distributed._composable.fsdp import fully_shard
from torch.distributed.device_mesh import init_device_mesh
def setup_fsdp2():
"""Setup for FSDP2"""
# Initialize device mesh for FSDP2
device_mesh = init_device_mesh("cuda", (torch.distributed.get_world_size(),))
rank = torch.distributed.get_rank()
return device_mesh, rank
# FSDP2 Mixed Precision Policy (Note: buffer_dtype not available)
mixed_precision_policy = MixedPrecision(
param_dtype=torch.bfloat16, # Use BF16 for parameters
reduce_dtype=torch.float32, # Use FP32 for gradient reduction
# buffer_dtype not supported in FSDP2
)
# Model setup for FSDP2
device_mesh, rank = setup_fsdp2()
model = SimpleModel(vocab_size=1000, hidden_size=512, num_layers=4)
# Apply FSDP2 with mixed precision
fsdp2_model = fully_shard(
model,
mesh=device_mesh,
mixed_precision=mixed_precision_policy,
)
optimizer = optim.Adam(fsdp2_model.parameters(), lr=1e-4)
criterion = nn.CrossEntropyLoss()Training Loop FSDP2
def train_fsdp2(fsdp2_model, dataloader, optimizer, criterion, num_epochs=5):
"""Training loop for FSDP2 with mixed precision"""
fsdp2_model.train()
for epoch in range(num_epochs):
total_loss = 0.0
for batch_idx, (data, targets) in enumerate(dataloader):
data = data.cuda()
targets = targets.cuda()
# Zero gradients
optimizer.zero_grad()
# Forward pass - FSDP2 handles precision automatically
outputs = fsdp2_model(data)
loss = criterion(outputs, targets)
# Backward pass - no scaling needed
loss.backward()
# Optional: Gradient clipping
torch.nn.utils.clip_grad_norm_(fsdp2_model.parameters(), max_norm=1.0)
# Optimizer step
optimizer.step()
total_loss += loss.item()
if rank == 0 and batch_idx % 10 == 0:
print(f'FSDP2 - Epoch [{epoch+1}/{num_epochs}], '
f'Step [{batch_idx}], Loss: {loss.item():.4f}')
if rank == 0:
avg_loss = total_loss / len(dataloader)
print(f'FSDP2 - Epoch [{epoch+1}] Average Loss: {avg_loss:.4f}')
# Usage
train_fsdp2(fsdp2_model, dataloader, optimizer, criterion)FSDP2 with Gradient Accumulation
def train_fsdp2_with_accumulation(fsdp2_model, dataloader, optimizer, criterion,
accumulation_steps=4, num_epochs=5):
"""FSDP2 training with gradient accumulation"""
fsdp2_model.train()
for epoch in range(num_epochs):
total_loss = 0.0
optimizer.zero_grad()
for batch_idx, (data, targets) in enumerate(dataloader):
data = data.cuda()
targets = targets.cuda()
# Forward pass
outputs = fsdp2_model(data)
loss = criterion(outputs, targets) / accumulation_steps
# Backward pass
is_accumulation_step = (batch_idx + 1) % accumulation_steps == 0
model.set_requires_gradient_sync(is_accumulation_step) # enable/disable gradient syncing
loss.backward()
# Perform optimizer step every accumulation_steps
if is_accumulation_step:
torch.nn.utils.clip_grad_norm_(fsdp2_model.parameters(), max_norm=1.0)
optimizer.step()
optimizer.zero_grad()
if rank == 0:
print(f'FSDP2 - Optimizer step completed')
total_loss += loss.item() * accumulation_steps
# Handle remaining batches
if len(dataloader) % accumulation_steps != 0:
torch.nn.utils.clip_grad_norm_(fsdp2_model.parameters(), max_norm=1.0)
optimizer.step()
optimizer.zero_grad()
# Usage
train_fsdp2_with_accumulation(fsdp2_model, dataloader, optimizer, criterion)Key Differences: FSDP1 vs FSDP2
| Feature | FSDP1 | FSDP2 |
|---|---|---|
| Import | from torch.distributed.fsdp import FSDP | from torch.distributed._composable.fsdp import fully_shard |
| Initialization | Class wrapper around model | Function call on model |
| Device Mesh | Not required | Uses init_device_mesh() |
| buffer_dtype | ✅ Supported | ❌ Not supported |
| no_sync() | ✅ Available for grad accumulation | ⚡️ use set_requires_gradient_sync() |
| API Style | Object-oriented | Functional |
Best Practices
1. Precision Selection Guidelines
# For speed and memory efficiency (Recommended)
MixedPrecision(
param_dtype=torch.bfloat16, # Better numerical stability than FP16
reduce_dtype=torch.float32, # Always use FP32 for gradient reduction
)
# For maximum memory savings (Use with caution)
MixedPrecision(
param_dtype=torch.float16, # Smaller memory footprint
reduce_dtype=torch.float32, # Still use FP32 for stability
)2. Common Pitfalls to Avoid
# ❌ DON'T: Use FP16 for gradient reduction
MixedPrecision(
param_dtype=torch.bfloat16,
reduce_dtype=torch.float16, # Can cause training instability
)
# ❌ DON'T: Keep params in FP32 (no benefit)
MixedPrecision(
param_dtype=torch.float32, # No speed/memory benefit
reduce_dtype=torch.float32,
)
# ✅ DO: Use the recommended configuration
MixedPrecision(
param_dtype=torch.bfloat16,
reduce_dtype=torch.float32,
)3. Monitoring and Debugging
def monitor_fsdp_precision(model, sample_input):
"""Monitor parameter and gradient dtypes in FSDP"""
print("=== FSDP Precision Monitoring ===")
# Check parameter dtypes
for name, param in model.named_parameters():
if hasattr(param, 'dtype'):
print(f"Parameter {name}: {param.dtype}")
# Forward pass to check computation dtype
model.train()
output = model(sample_input)
loss = output.sum()
print(f"Output dtype: {output.dtype}")
print(f"Loss dtype: {loss.dtype}")
# Backward pass to check gradient dtypes
loss.backward()
for name, param in model.named_parameters():
if param.grad is not None:
print(f"Gradient {name}: {param.grad.dtype}")
# Usage
sample_data = torch.randint(0, 1000, (2, 128)).cuda()
monitor_fsdp_precision(fsdp_model, sample_data)4. Performance Optimization
# Enable compilation for additional speedup (PyTorch 2.0+)
fsdp_model = torch.compile(fsdp_model)
# Use appropriate backward prefetch strategy
backward_prefetch = BackwardPrefetch.BACKWARD_PRE # For FSDP1
# Optimize memory usage
torch.cuda.empty_cache() # Clear unused memoryHardware Recommendations
- Preferred: NVIDIA GPUs with BF16 support (A100, H100, RTX 30/40 series)
- Memory: FSDP mixed precision typically reduces memory usage by 40-50%
- Network: High-bandwidth interconnect (InfiniBand, NVLink) for gradient synchronization
- Batch Size: Can use larger batch sizes due to reduced memory footprint
Migration Guide: AMP to FSDP Mixed Precision
# Before: Using AMP with FSDP
from torch.cuda.amp import autocast, GradScaler
scaler = GradScaler()
with autocast():
output = fsdp_model(data)
loss = criterion(output, target)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()
# After: Using FSDP Mixed Precision (Cleaner)
mixed_precision = MixedPrecision(
param_dtype=torch.bfloat16,
reduce_dtype=torch.float32,
)
fsdp_model = FSDP(model, mixed_precision=mixed_precision)
# Simple training loop - no autocast/scaler needed
output = fsdp_model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()Key advantages of FSDP mixed precision over AMP:
- No manual loss scaling required
- Distributed-aware precision handling
- Integrated with parameter sharding
- Simpler code with fewer moving parts
Performance Optimization Tips
- Use Tensor Cores: Ensure tensor dimensions are multiples of 8 for optimal Tensor Core utilization
- Batch Size: Mixed precision allows larger batch sizes due to reduced memory usage
- Model Architecture: Some architectures benefit more from mixed precision than others
- Data Loading: Ensure data loading doesn’t become a bottleneck with faster training
- Gradient Accumulation: Combine with gradient accumulation for very large effective batch sizes
Hardware Requirements
- Recommended: NVIDIA GPUs with Tensor Cores (V100, A100, RTX 20/30/40 series)
- Minimum: NVIDIA GPUs with compute capability 7.0+
- Memory: Mixed precision typically reduces memory usage by 40-50%
- Speed: 1.5-2x speedup on compatible hardware, minimal benefit on older GPUs